Robot humanoïde Romeo (à Rennes)
Romeo est un robot humanoïde développé par la société Aldebaran Robotics (voir Fig. 1) qui vise à être un véritable assistant et compagnon personnel. En septembre 2014, nous avons été le premier des quatre laboratoires Européen à être équipé de Romeo. Aujourd'hui, cette plateforme sert à valider nos recherches. Dès son arrivée, à partir de nos travaux en asservissement visuel et en suivi visuel, nous avons développé une première expérimentation de saisie d'un objet (voir Fig. 2) afin de le donner à un humain. Une vidéo de ce premier travail est disponible sur youtube (voir la vidéo).




Drones (à Rennes)
En 2014, l'équipe a démarré de nouvelles activités autour du contrôle d'un ou plusieurs drones d'intérieur. Pour mener à bien ces activités, nous avons acquis fin 2014 deux quadricoptères, l'un de Mikrokopter Gmbh, Allemagne (Fig. 3), et l'autre de 3DRobotics (Fig. 4), USA. Ces drones d'intérieur vont nous permettre d'expérimenter différentes lois de commande visant à commander un seul drone, voire une flottille entière, tout en prenant soin d'exploiter principalement les images fournies par une caméra embarquée.
Plateforme de vision robotique (à Rennes)
Nous exploitons deux robots industriels (voir Fig. 5) conçus par la société Afma Robots dans les années 90 pour valider nos recherches en asservissement visuel et en vision active. Le premier est un robot cartésien à six degrés de liberté. Le second est un robot cylindrique à quatre degrés de liberté. Ces robots sont équipés de caméras. Sur le cartésien, nous pouvons également embarquer un préhenseur pneumatique. Ces deux robots peuvent être combinés pour proposer simultanément des configurations de caméra embarquée ou déportée. Une vidéo illustrant la saisie d'objets par asservissement visuel réalisé sur le robot cartésien est disponible sur youtube (voir la vidéo). Cette autre vidéo montre le préhenseur à deux doigts parallèles qu'il est possible d'embarquer sur le cartésien.

Plateforme de robotique médicale (à Rennes)
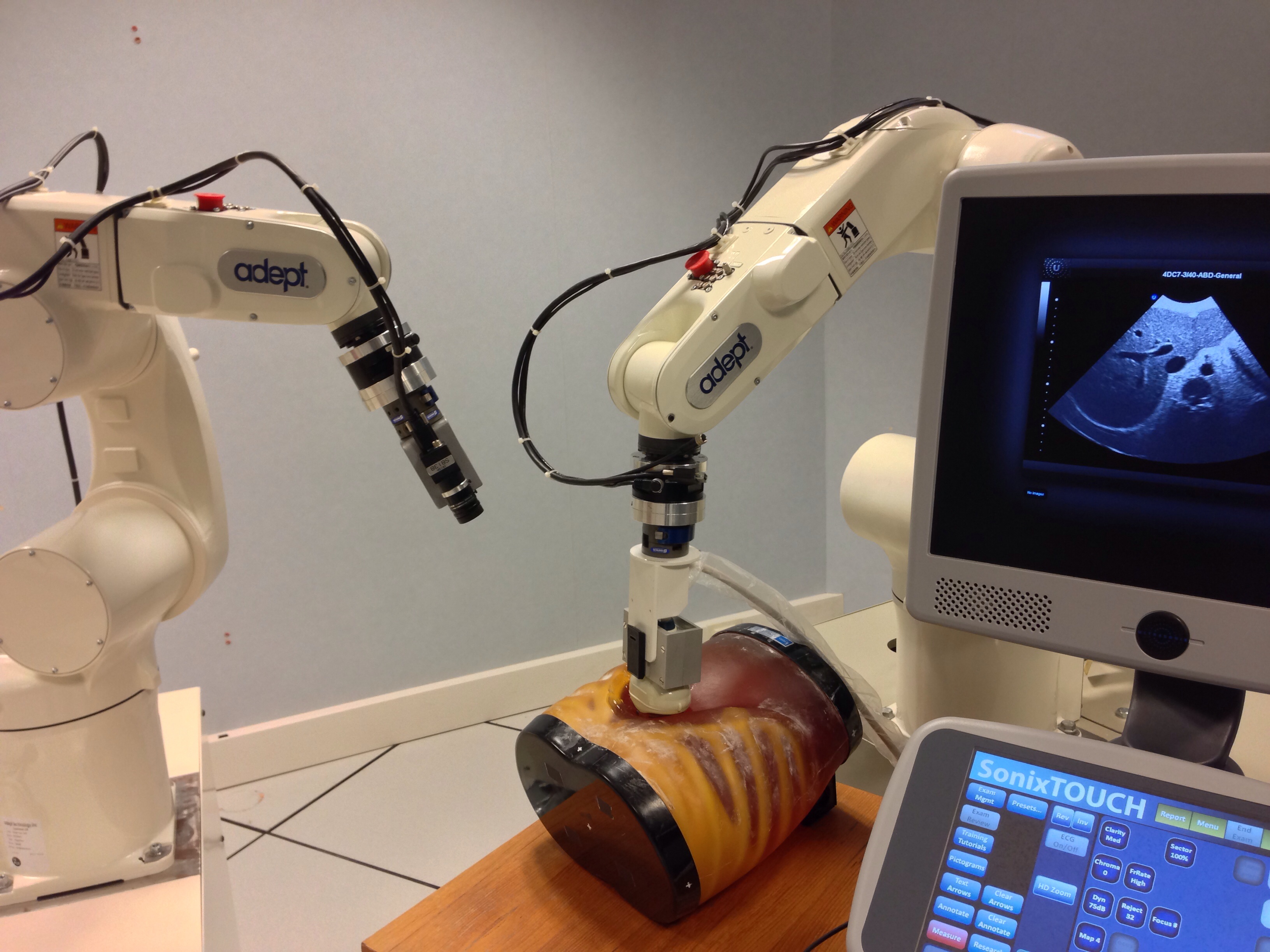
Cette plateforme est dédiée à nos recherches et expérimentations dans le domaine de l'asservissement visuel à partir d'images ultrasones pour des applications de positionnement d'une sonde échographique, de suivi et d'insertion d'aiguille sous imagerie échographique.
Cette plateforme est constituée de deux robots Adept Viper à six degrés de liberté (voir Fig. 6). Des sondes échographiques 2D ou 3D reliées respectivement soit à un échographe SonoSite 180 Plus, soit à un SonixTouch d'Ultrasonix peuvent être fixées sur un capteur d'effort embarqué sur l'un ou l'autre des robots. Une vidéo disponible sur youtube illustre des travaux récents d'insersion d'une aiguille sous imagerie 3D ultrasone guidée par la robotique et réalisée sur cette plateforme (voir la vidéo).
Grâce à un système de changeur d'outil, des caméras peuvent également être embarquées sur les deux robots afin de transformer cette plateforme en une plateforme plus générique. Des vidéos de positionnement du Viper 650s par rapport à une cible ont été réalisées pour illustrer le comportement d'un asservissement visuel basé image (voir la vidéo), celui d'un asservissement visuel basé position (voir la vidéo) et celui mixant des informations 2D et 3D (voir la vidéo).
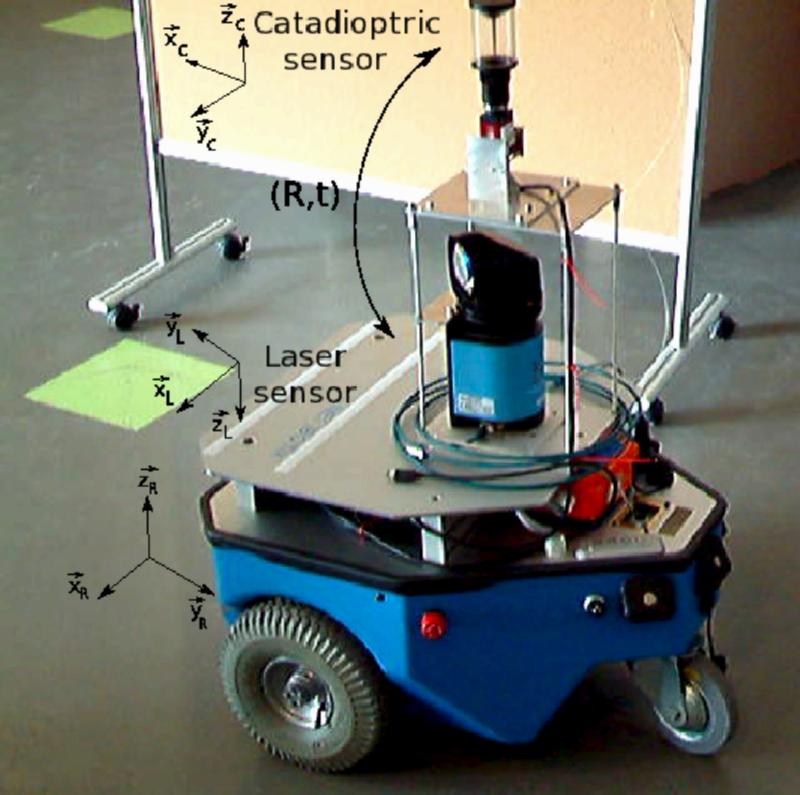
Plateforme de robotique mobile d'intérieur
Pour le prototypage rapide d'algorithmes de perception, de contrôle et de navigation autonome, l'équipe exploite Hannibal à Sophia-Antipolis, une plateforme de type unicycle de Neobotix (voir Fig. 7), et, à Rennes, un Robotino de Festo (voir Fig. 8) et un Pioneer 3DX de chez Adept (voir Fig. 9). Ces matériels sont équipés de capteurs requis pour du Slam, de la navigation autonome et plus généralement du contrôle basé capteur. Une vidéo de positionnement du Pioneer par asservissement visuel est disponible sur youtube (voir la vidéo).
Par ailleurs, pour valider nos recherches dans le domaine de l'assistance à la personne, à Rennes nous disposons de deux fauteuils roulants électriques, l'un de la société Penny et Giles Drives Technology (Fig. 10) l'autre de chez You-Q (voir Fig. 11). Le contrôle des fauteuils est réalisé à partir d'un système plug and play situé entre le joystick et le contrôleur bas-niveau du fauteuil. Un tel système nous permet de capter l'intention de l'utilisateur à partir de son utilisation du joystick tout en appliquant des corrections dans la trajectoire du fauteuil. L'ajout de caméras et de capteurs ultrason nous permet également de développer des lois de commande pour de l'assistance à la conduite.




Plateforme de robotique mobile d'extérieur
L'équipe exploite également des Cycab, de petits véhicules électriques. Deux véhicules situés à Sophia-Antipolis (voir Fig. 12) et un à Rennes (voir Fig. 13) sont instrumentés de caméras et de télémètres laser pour valider nos recherches dans le domaine des transports urbains dits intelligents. Une vidéo de navigation autonome du Cycab sur la place de Jaude à Clermont-Ferrand est disponible sur youtube (voir la vidéo).

