Humanoid robot Romeo (in Rennes)
Romeo is a humanoid robot from Aldebaran Robotics (see Fig. 1) which is intended to be a genuine personal assistant and companion. In September 2014, we were the first of the four European research laboratories that acquire a Romeo. This research platform is now being used to validate our researches. We developed a first demonstration that make use of visual servoing and visual tracking approaches developed in the team to grasp a box (see Fig. 2) and deliver it to a human (see the video).




Drones (in Rennes)
In 2014 the team also started some activities involving perception and control for single and multiple quadrotor UAVs. To this end, we purchased two quadrotors from Mikrokopter Gmbh, Germany (Fig. 3), and one quadrotor from 3DRobotics (Fig. 4), USA. These quadrotors will be used as robotic platforms for testing a number of single and multiple flight control schemes with a special attention on the use of onboard vision as main sensory modality.
Robot vision platform (in Rennes)
We exploit two industrial robotic systems built by Afma Robots in the nineties to validate our researches in visual servoing and active vision. The first one is a Gantry robot with six degrees of freedom, the other one is a cylindrical robot with four degrees of freedom (see Fig. 5). These robots are equipped with cameras. The Gantry robot allows also to embed grippers on its end-effector. They can be used simultaneously to provide eye-in-hand and eye-to-hand configurations. A video that illustrates the grasping of some objects by visual servoing done on the Gantry robot is available on youtube (see the video). This other video shows the two fingers parallel grip that we can mount on the Gantry end-effector.

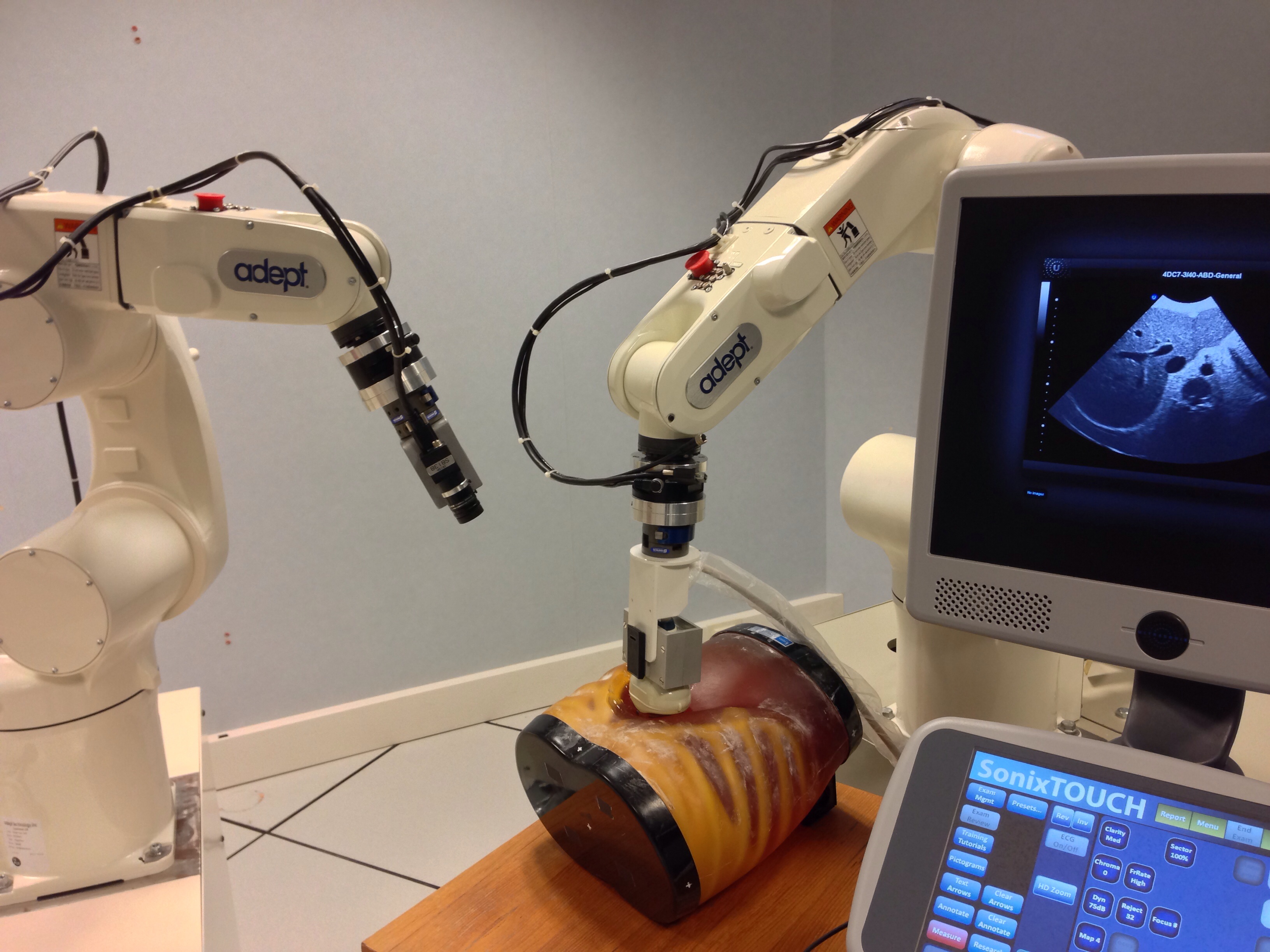
Medical robotics platform (in Rennes)
This testbed is of primary interest for researches and experiments concerning ultrasound visual servoing applied to probe positioning, soft tissue tracking or robotic needle insertion tasks.
This platform is composed by two Adept Viper six degrees of freedom arms (see Fig. 6). Ultrasound probes connected either to a SonoSite 180 Plus or an Ultrasonix SonixTouch imaging system can be mounted on a force torque sensor attached to each robot end-effector. A video available on youtube shows the 3D ultrasound-guided robotic steering of a flexible needle done on this platform (see the video).
Thanks to a tool changer, cameras can also be mounted on the robot end-effector in order to transform this platform in a more generic one. Videos that illustrate a positioning task where done in order to compare the behavior when using an image-based visual servoing (see the video), when using a position-based visual servoing (see the video), or when using a visual servoing scheme that mix 2D and 3D information (see the video).
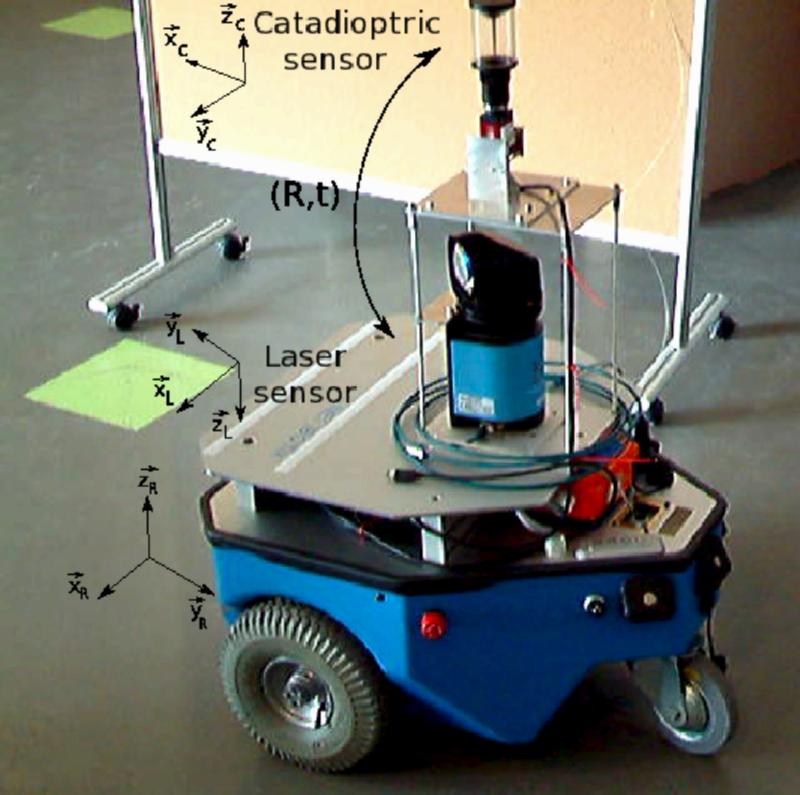
Indoor mobile robotics platform
For fast prototyping of algorithms in perception, control and autonomous navigation, the team uses Hannibal in Sophia-Antipolis, a cart-like platform built by Neobotix (see Fig. 7), and, in Rennes, a Robotino from Festo (see Fig. 8) and Pioneer 3DX from Adept (see Fig. 9). These platforms are equipped with various sensors needed for Slam purposes, autonomous navigation and sensor-based control. A video that illustrates the positioning of the Pioneer by visual servoing is available on youtube (see the video).
Moreover, to validate the researches in personally assisted living topic, we have in Rennes a six wheel electric wheelchair from Penny and Giles Drives Technology (see Fig. 10) and a five wheel electric wheelchair from You-Q (see Fig. 11). The control of the wheelchair is performed using a plug and play system between the joystick and the low level control of the wheelchair. Such a system let us acquire the user intention through the joystick position and control the wheelchair by applying corrections to its motion. The wheelchairs have been fitted with cameras and eleven ultrasound sensors to perform the required servoing for assisting handicapped people.




Outdoor mobile robotics platform
The team exploits also Cycab urban electrical cars. Two vehicles in Sophia-Antipolis (see Fig. 12) and one in Rennes (see Fig. 13) are instrumented with cameras and range finders to validate researches in the domain of intelligent urban vehicle. Cycabs were used as experimental testbeds in several national projects. A video that illustrates the autonomous navigation of a Cycab on Jaude square in Clermont-Ferrand is available on youtube (see the video).

