We began in 2006 a project for the European Space Agency. It is realized in collaboration with the Trasys company (Brussels), Galileo Avionica (Milano) and KUL (Leuven). Its aim is to develop a demonstrator of a robot arm in space environment able to grasp objects by visual servoing. The considered robot is the ESA Eurobot. The configuration of this robot (3 arms) allows to consider multiple cameras (with wide baseline) in order to allow eye-in-hand or eye-to-hand control.
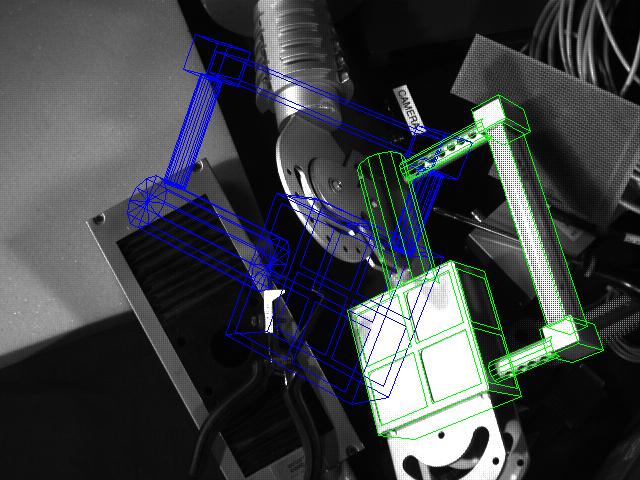
As this point the tracking and visual servoing capabilities have been tested at INRIA Rennes using a classical 6-axis robot. Further tests using the Eurobot would be done within few months at ESA-ESTEC in the Netherlands on the ISS testbed. Within this paper, we consider an object named Articulated Portable Foot Restraint (APFR). This is a quite complex non-polyhedric object as can be seen in the image on the right.
Results
Full quicktime video (High quality 100Mo, medium quality 10Mo )
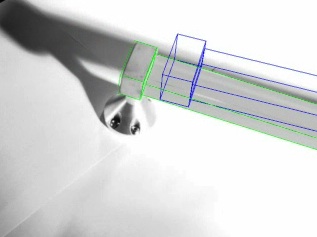
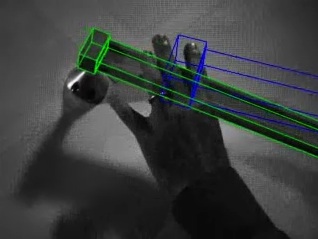
| APFR | Handrail | |
 |
 |
|
 |
Reference
- F. Dionnet, E. Marchand. Robust model-based tracking with multiple cameras for spatial applications. In 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation, ASTRA 2006, Pages 287-294, Noordwijk, Pays-Bas, Novembre 2006.


- F. Dionnet, E. Marchand. Robust stereo tracking for space robotic applications. In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS'07, Pages 3373-3378, San Diego, CA, October 2007. (IROS'07 Best application paper award)
The monocular tracker is described in :
- A.I. Comport, E. Marchand, M. Pressigout, F. Chaumette. Real-time markerless tracking for augmented reality: the virtual visual servoing framework. IEEE Trans. on Visualization and Computer Graphics, 12(4), July/August 2006.
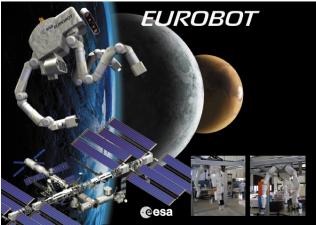
Image thanks to European Space Agency

Image thanks to European Space Agency

APFR (Articulated portable foot restraint) APFR courtesy of European Space Agency