This page presents a real-time, robust and efficient 3D model-based tracking algorithm adapted to catadioptric images. A virtual visual servoing approach is used for 3D tracking. This method is similar to more classical non-linear pose computation techniques. Robustness is obtained by integrating a M-estimator into the virtual visual control law via an iteratively re-weighted least squares implementation.
Results of the virtual visual servoing tracker with perspective cameras are presented in Real-time 3D localisation and tracking page.
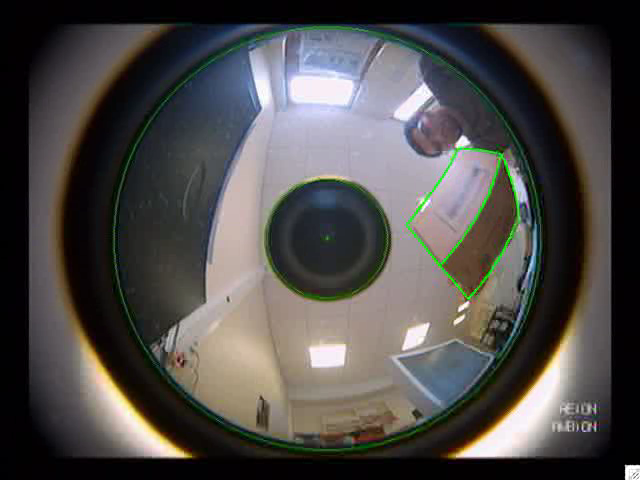
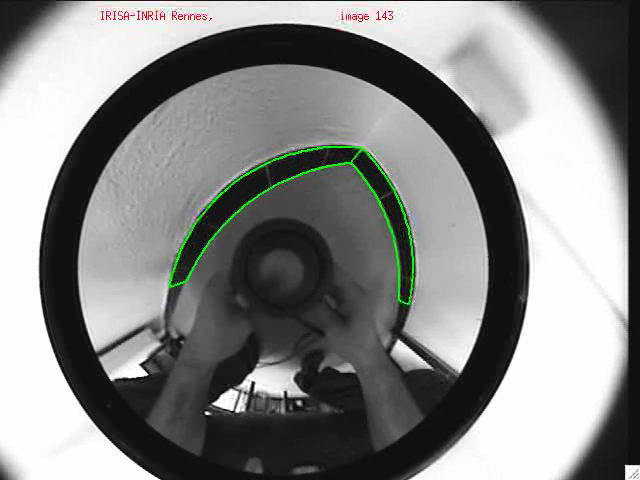
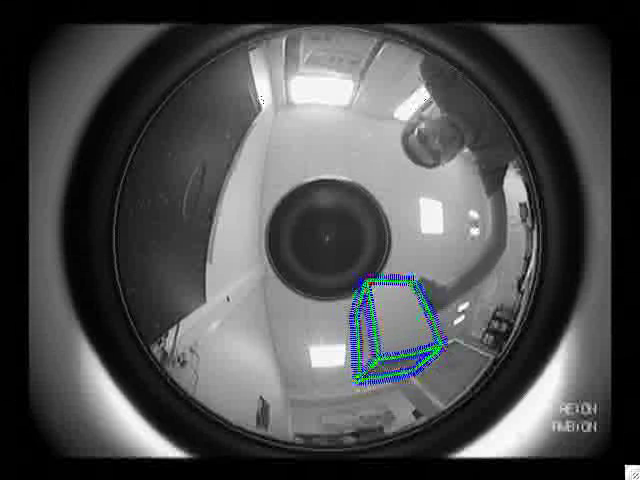
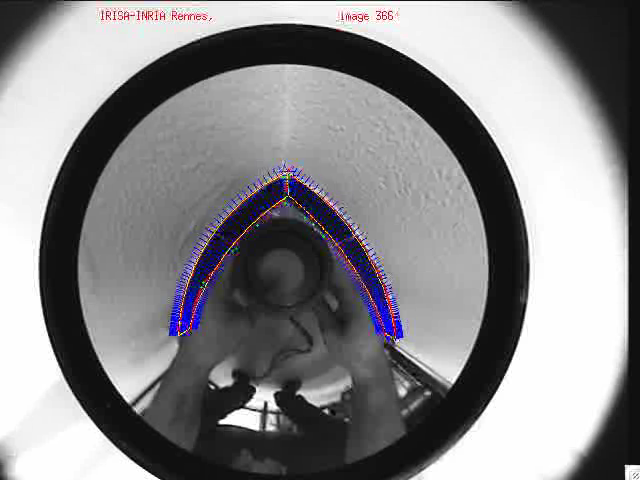
In this page we present results of the extension of this approach to the use of catadioptric cameras.




 click for the video
click for the video