The 2D Adaptive Non-Local Means filter can be tested online here .
Abstract. Partial Differential equations (PDE), wavelets-based methods and neighborhood filters were proposed as locally adaptive machines for noise removal. Recently, Buades, Coll and Morel proposed the Non-Local (NL-) means filter for image denoising (see Buades, A., Coll, B., Morel, J.M.: A review of image denoising algorithms, with a new one. Multiscale Modeling and Simulation. 4 (2005) 490-530). This method replaces a noisy pixel by the weighted average of other image pixels with weights reflecting the similarity between local neighborhoods of the pixel being processed and the other pixels. The NL-means filter was proposed as an intuitive neighborhood filter but theoretical connections to diffusion and non-parametric estimation approaches are also given by the authors. In this paper we propose another bridge, and show that the NL-means filter also emerges from the Bayesian approach with new arguments. Based on this observation, we show how the performance of this filter can be significantly improved by introducing adaptive local dictionaries and a new statistical distance measure to compare patches. The new Bayesian NL-means filter is better parametrized and the amount of smoothing is directly determined by the noise variance (estimated from image data) given the patch size. Experimental results are given for real images with artificial Gaussian noise added, and for images with real image-dependent noise.
Adaptive (block-wise) Non-Local means filter
Consider a gray-scale image
![]() defined over a bounded domain
defined over a bounded domain
![]() , (which is usually a rectangle) and
, (which is usually a rectangle) and
![]() is the noisy observed intensity at pixel
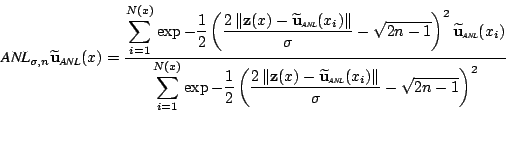
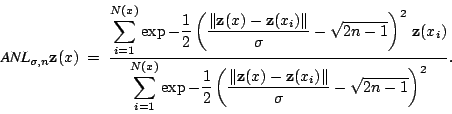
is the noisy observed intensity at pixel ![]() . The proposed Adaptive NL-means filter (ANL) is defined as
. The proposed Adaptive NL-means filter (ANL) is defined as
Iterative (plugin estimator) Adaptive Non-Local means filter
We are free to substitute the vector
![]() of aggregated estimators (computed from the set of restored blocks
of aggregated estimators (computed from the set of restored blocks
![]() . The corresponding plugin and iterative ANL filter defined as
. The corresponding plugin and iterative ANL filter defined as
Experimental results
|
|