|
Second scenario: User Experience in a Virtual
Museum
|
|
 |
|
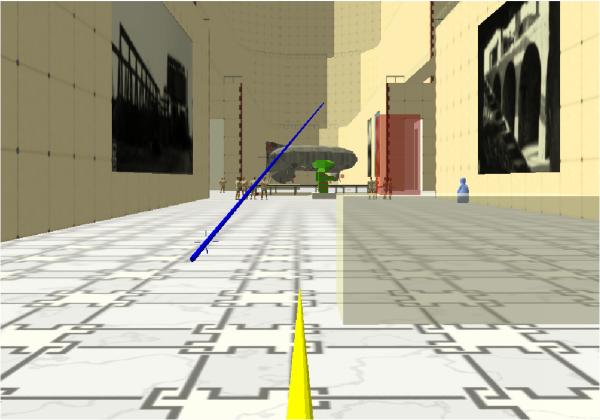
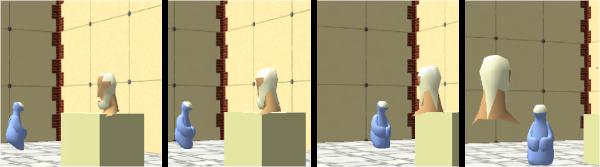
| Beginning of the scenario. The user can move
a blue ray by using magnetic sensor (a flock of bird with 6 degrees of
freedom). The yellow ray represent its direction of navigation. Different
buttons on the peripheral allows the user to go straight, and forward,
to turn left and right and to take and release a statuette. The rad area
represent the taget area of the statuette. The blue robot on the right,
is ont the way to take its own statuette. Some autonomous agents can be
seen on the background. Their behaviour consist in being in the way of
the visitor during his search of the statuette. |
|
 |
|
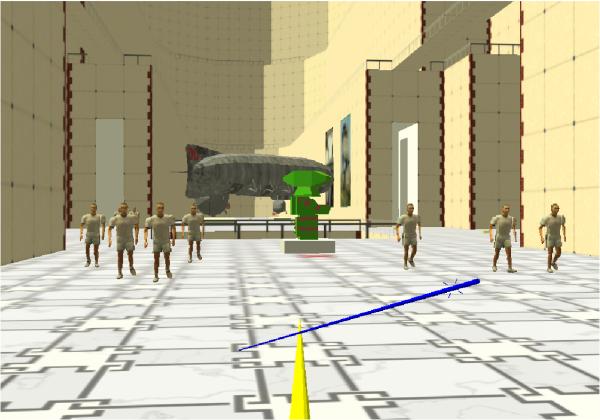
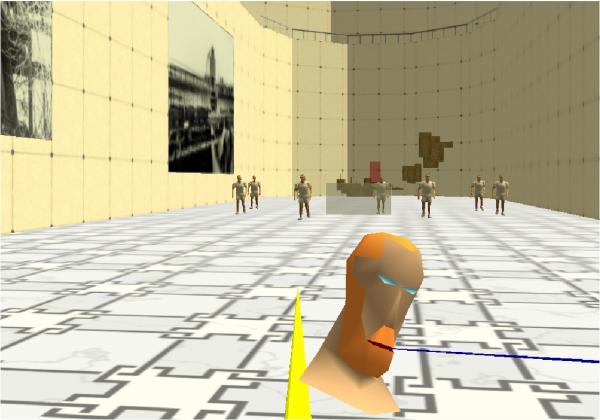
| The user has started to move in the direction of the statuette. In
reaction, the scenario has asked to a sub-group of autonomous agents to
move in its direction: the visitor will have to avoid them. |
|
 |
|
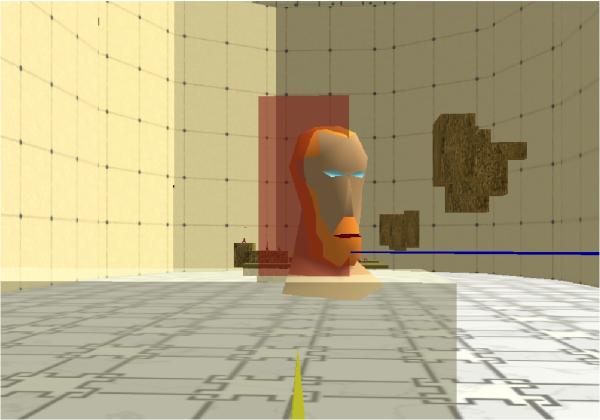
| After having avoided the first group, a second one is moving in its
direction. The statuette is now clearly in the filed of view of the visitor. |
|
 |
|
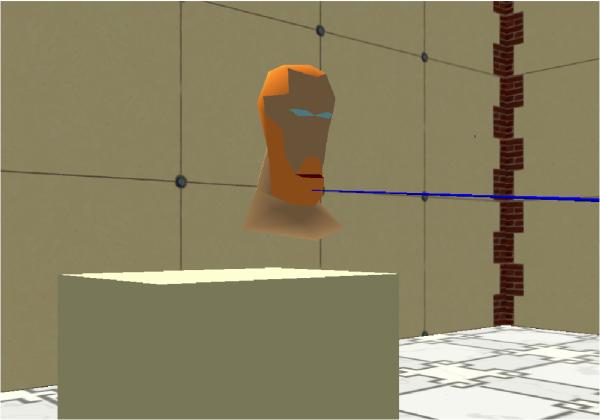
| The visitor takes the statuette by using the blue ray. |
|
 |
|
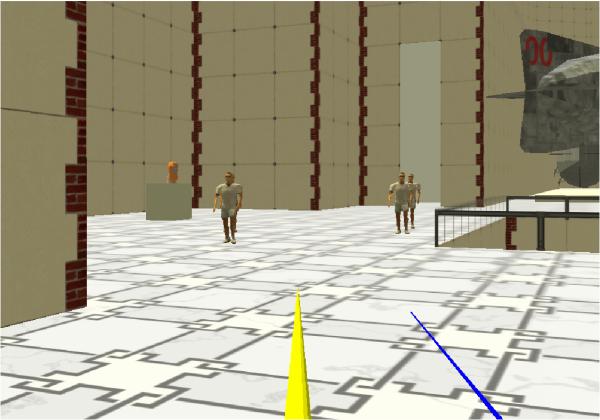
| At this moment, when he turns around, the user can see a group of autonomous
agents just around him. The red arrow shows the location of the robot who
is moving slowly in the direction of the other statuette. |
|
 |
|
| Le robot takes its own statuette. |
|
 |
|
| On the way back, the first group will cross again the visitor path. |
|
 |
|
| The visitor leaves the statuette at its target location. This is the
end of the manipulation and of the scenario. |