[an error occurred while processing this directive]
Nicolas Mansard
| Contact
| Background and position
| Publications
| Research
|
Contact
Email : Nicolas.Mansard@irisa.fr
Address : IRISA / INRIA Rennes
Campus Universitaire de Beaulieu
35042 Rennes cedex - France
Tel : +33 2 99 84 25 45
Fax : +33 2 99 84 71 71
Assistant : +33 2 99 84 22 52
(Céline Ammoniaux)
Resume : Click here for my vita (pdf file)
|

|
Background and Position
Now at Stanford
I have started my post-doc with Oussama Khatib, in the Computer Science Departement of the Stanford University. You can consult my new home page here.
PhD Defense
My PhD defense has occured on the 12th of December, 2006. The defence comitee was composed of Albert BENVENISTE (directeur de recherche, IRISA, Rennes),
Etienne DOMBRE (directeur de recherche, LIRMM, Montpellier), Abderrahmane KHEDDAR (directeur de recherche, JRL, Tsukuba, Japan), Jean-Paul LAUMOND (directeur de recherche, LAAS, Toulouse), José SANTOS VICTOR (associate professor, ISR/IST, Lisbon, Protugal), Luigi VILLANI (associate professor, University of Napoli, Italy) and Francois CHAUMETTE (directeur de recherche, IRISA, Rennes).
GDR-Macs Best Thesis: My thesis has been selected has one of the best french thesis of the GDR-Macs for the years 2005-2006.
My thesis is available here (in french):
N. Mansard. Enchaînement de tâches robotiques. PhD Thesis Université de Rennes 1, mention informatique, December 2006. 

The slides of the prentation are available, in pdf file (800Ko), in power-point format (6.7Mo) or in zipped power-point format, including the videos (24Mo).
Cursus
Since September 2003, I have been working as a PhD student in the Lagadic
team in IRISA. My adviser is
François Chaumette.
I am a former student of the Ecole
Normale Superieure de Cachan (2003-2004).
In June 2003, I graduated with a Master (DEA) in computer science, specialized
in Image-Vision-Robotics,
obtained at the Institut National Polytechnique
de Grenoble (INPG).
I graduated with a Master of Engineering obtained at the Ecole
Nationale Superieure d'Informatique et Mathematiques Appliquees de Grenoble (ENSIMAG) in 2003.
Selected publications
Complete list (with postscript or pdf files if available)
Academic Journals
- N. Mansard, F. Chaumette. Task sequencing for sensor-based control. IEEE Trans. on Robotics, 23(1):60-72, February 2007.
- N. Mansard, F. Chaumette. Directional redundancy. Conditionnaly accepted in IEEE Trans. Automatic Control.
- N. Mansard, A. Remazeilles, F.Chaumette. Continuity of Varying-Feature-Set Control Laws. Submitted to IEEE Trans. on Automatic Control, 2007.
International Conferences
- N. Mansard, O. Stasse, F. Chaumette, K. Yokoi. Visually-Guided Grasping while Walking on a Humanoid Robot. In IEEE Int. Conf. on Robotics and Automation, ICRA'07, Roma, Italia, April 2007.
- N. Mansard, M. Lopes, J. Santos-Victor, F. Chaumette. Jacobian Learning Methods for Tasks Sequencing in Visual Servoing. In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS'06, Beijing, China, October 2006.
- A. Remazeilles, N. Mansard, F. Chaumette. Qualitative Visual Servoing: application to the visibility constraint. In IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS'06, Beijing, China, October 2006.
- N. Mansard, F. Chaumette. Directional redundancy: a new approach of the redundancy formalism. In IEEE Conf. on Decision and Control and European Control Conference, CDC/ECC 2005, Pages 5366-5371, Seville, Spain, December 2005.
- N. Mansard, F. Chaumette. Visual servoing sequencing able to avoid obstacles. In IEEE Int. Conf. on Robotics and Automation, ICRA'05, Pages 3154-3159, Barcelona, Spain, April 2005.
Research areas
My research activities are concerned with visual servoing, and more
specifically the integration of visual-servoing schemes into real robot
applications. This research topic is at the intersection of the fields of
robotics, automatic control, and computer vision.
Objectives and research motivations
Basically, visual servoing techniques consist in using the data provided by one
or several cameras in order to control the motions of a dynamic system. Such
systems are usually robot arms, mobile robots, or even virtual robots such as
animated virtual humanoids. These techniques are very efficient for numerous
types of robotic problems, providing accurate positioning, good robustness to
noise, stability, etc. However, the control can become difficult or even
erratic when the displacement is large. Moreover, the control is only
interested in the links between the camera and the tracked visual features. To
integrate the servo into a real complex robotic system, the control should also
make sure that it avoids undesirable configurations such as articular joint
limits, obstacle or visual occlusions.
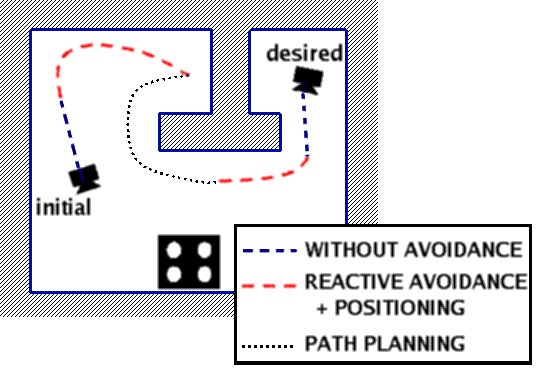
The first works addressing these problems are based of path planning
methods. However such a solution requires a lot of knowledge about the robot
and its environment. It is thus less reactive to changes of the goal, the
environments or the constraints. Our research work is mainly focused on a
reactive way to solve this problem. In this meaning, our work is more similar
to switching control laws or sequencing control laws. Two approaches
have been developed in parallel.
High-level control
|
The first approach is to propose a high-level execution controller that enables
or disables some parts of the global control law to ensure global convergence
and obstacle avoidance. Far from any obstacle, the robot moves according to
a full task constraining all its degrees of freedom. When it comes closer to a
configuration to avoid, the higher-level controller removes one constraint. The
obtained DOF can be used to avoid the obstacle. The constraint is activated
again when the obstacle is avoided. The controller also ensures the global
convergence by activating a partial path-following task when a local minimum is
reached. The robot finally accomplishes the global task by sequencing
full-constraining tasks, redundant tasks plus avoidance criteria, and
path-following phases.
This approach as been experimentally validated on the
six-DOF
manipulator robot Afma-6.
|
Low-level control
The second approach proposes several modifications of the classical task
function approach to free up some motion directly at the lowest level. A first
work, called directional redundancy, proposes a new approach of the
redundancy formalism (used to construct a control law that realizes a main task
and simultaneously takes supplementary constraints into account). The general
idea is to enable the motions produced by the secondary control law that help
the main task to be completed faster. The main advantage is to enhance the
performance of the secondary task by enlarging the number of available DOF. A
second more-recent work proposed to increase the available DOF by enlarging the
convergence area. Instead of reaching a specific point, the robot can stop in a
region around the goal, when the error is above a fixed threshold. The
convergence is then faster, and all the motions into the convergence area are
free for any secondary objective. This approach, called qualitative visual
servoing, will be used as a first step when sequencing several tasks.
All these works have been experimentally validated on the robotic platform of
the laboratory, a six-DOF eye-in-hand robot. A first attempt to adapt and
validate our approach to more complex robots has been realized in Lisbon,
Portugal, with the IST/ISR laboratory. A comparative work has been realized
with a humanoid torso (six-DOF arm plus four-DOF head). Due to difficult system
calibration, this robot required an adaptive learning process when sequencing
to complete the task.
Humanoid Robots

|
The first part of my current research is to prove that the tasks sequencing formalism is an appropriate
solution to control highly redundant robot realizing complex composed tasks
in real environment.
This research is part of a collaboration with the
Joint Robotic Laboratory, Tsukuba, Japan.
The experimental platform is the humanoid robot HRP-2. This robot is a highly
redundant humanoid mobile robot. It has several sensors for close-loop control,
including cameras. Two arms with hands enable it to realize complex task such
as object grasping. Complex executions such as door-opening have already been
realized using this robot. The current solution uses a 3D-reconstruction system
to map the robot environment, and then a open-loop motion generator to drive
the robot to its goal. Although this system provides a complete solution, it
can be greatly improves in term of robustness to detection noises and to
environment changes by the use of a reactive close-loop control such as task
sequencing. We propose thus to adapt and implement the task sequencing
formalism to the Humanoid Robot HRP-2 for a grasping-while-walking task.
Videos: External view (4.9M, MPEG-1 format) - Embeded-camera view(5.5M, MPEG-1 format)
|
|

Grasping a ball while walking
Future works
|
Another subject of current research concerns the control of mobile robots. The major part
of the existing control laws for mobile robot stabilization (ie. point-to-point
control) uses time-varying feedback. In these control scheme, the time variable is
explicitly used to modify the control behavior and thus overcome the non-holonomic
constraint. In that meaning, the control behavior modification by the time variable
can be seen as a sequencing of several tasks that are indexed by the time. Rather than
using the time variable as an open loop controller to select a sequence of tasks to
be applied, we propose to use a similar control structure as already used for manipulator
robots to stabilize a mobile robot. Some experiments are currently realized on the mobile robot
platform Cycab. It is a car-like robot with double-steering axes, and an embedded mounted on
a pan-tilt unit.
|

|
[an error occurred while processing this directive]