| Contact
| Background and position
| Research
| Publications
| Teaching
| CV |
New contact
Amaury Dame is now "Research Assistant" in the Active Vision Group,
Department of Engineering Science, University of Oxford
Email : adame@robots.ox.ac.uk
Web: Homepage
|

|
Background and Position
|
In 2007, I received a master degree in industrial computer science and electrical engineering from INSA Rennes (INSA) and Research Master degree in signal and image processing (STI) from the University of Rennes 1.
In December 2010, I received the Ph.D degree in computer science from the University of Rennes after having work
three years in the Lagadic research team in IRISA/INRIA Rennes Bretagne Atlantique under the supervision of Eric Marchand. The subject of my researches was to develop robust tracking and visual servoing algorithms.
I am currently searching for a postdoctoral position. My research interests include computer vision, active vision and visual servoing.
|
|
Research areas
|
In this thesis, we focused on both the use of optimization methods and robust alignement function to
propose new algorithms for the tracking and the visual servoing problems.
A metric derived from information theory, mutual information (MI), is principaly
considered. Mutual information is widely used in multi-modal image
registration (medical applications) since it is robust to
changes in the lighting conditions and to a wide class of non-linear
image transformation.
|
Mutual information based tracking
Mutual information based visual servoing
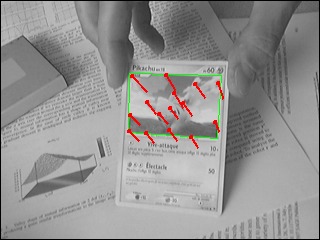
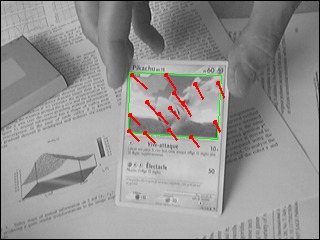
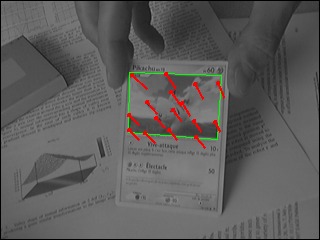
Optimal detection and tracking of feature points using Mutual Information
Principle
We propose a new way to achieve feature points detection and tracking.
An approach based on Mutual Information is propose to track each point
with a strong robustness to illumination variations.
Considering this tracking approach, an optimal detection of the points
is proposed to choose the points that will be the more efficiently tracked.
Validation
The proposed approach has been tested on various image sequences and compared
to the classical KLT approach. As the images opposite shows the proposed algorithm
is far more robust to illumination variations.
IEEE ICIP'09 
|
|
|
Publications
Complete list (with postscript or pdf files if available)
Teaching
Computer vision courses at INSA (National Institute of Applied Sciences) Rennes.
Curriculum vitae
Click here to get a pdf version
[an error occurred while processing this directive]
|